
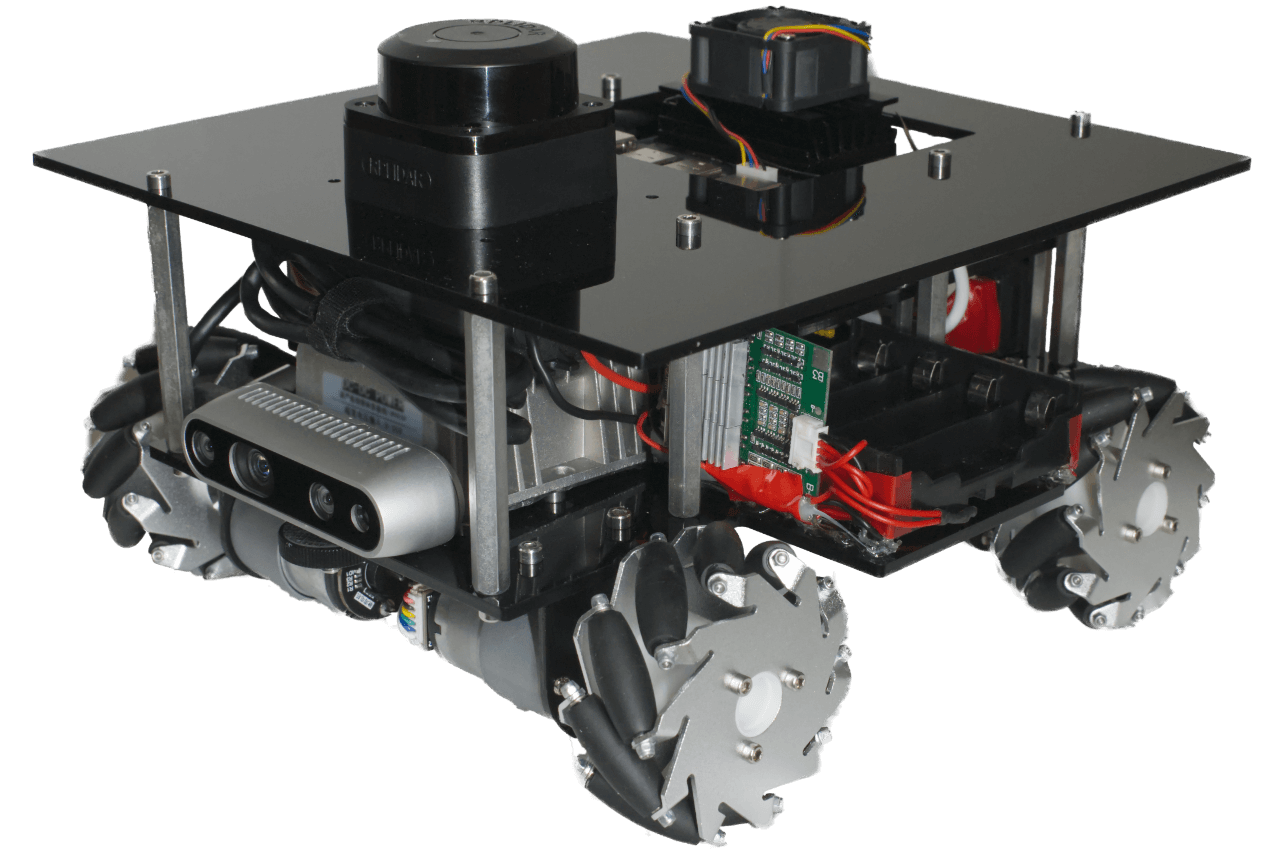
LGDXRobot2
A flexible DIY Mecanum wheel mobile robot designed to inspire your enthusiasm on robotics.
What is LGDXRobot2?
Step-by-Step Documentation
Step-by-step guides cover robot assembly as well as software setup and operation.
Flexible Robot Configuration
The firmware adapts to different chassis sizes and Mecanum wheel setups. Computers and sensors can be easily interchanged.
Simplified Robotics Development
ChassisTuner and ready-to-use Docker images significantly reduce the complexity of robot development and deployment.
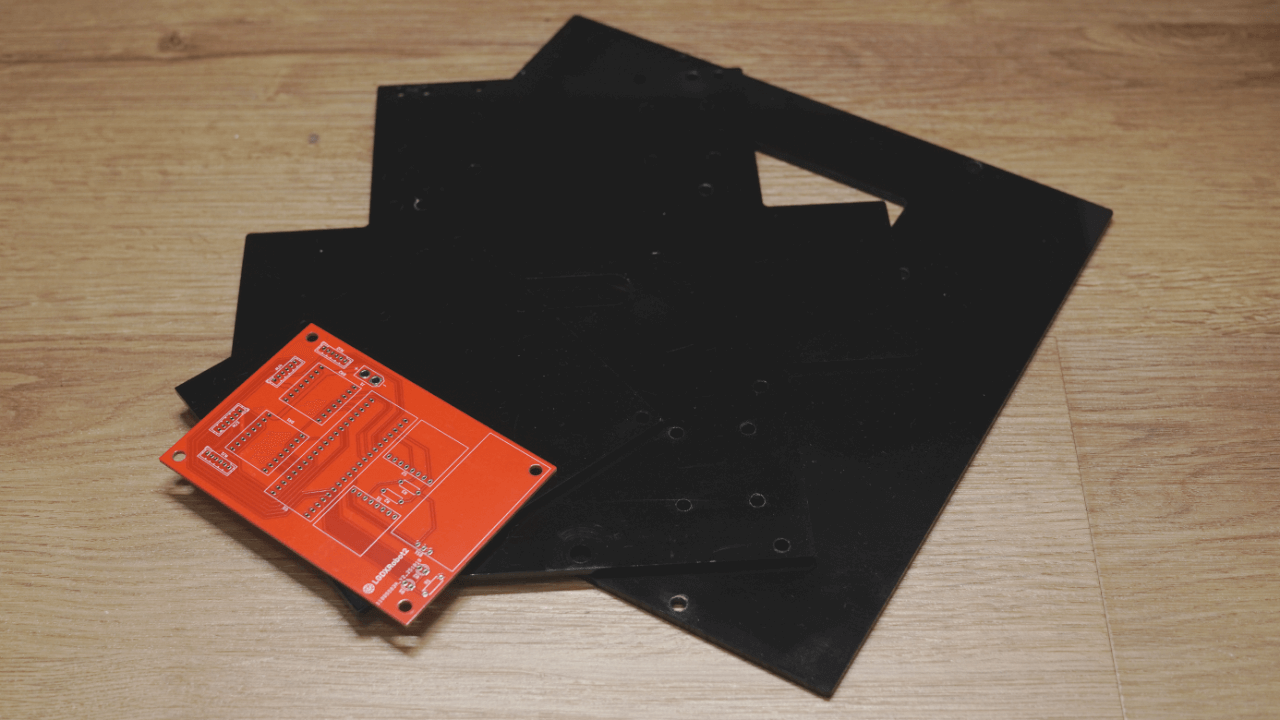
Open and Reproducible Hardware Design
Chassis
240 mm × 240 mm, three-layer chassis structure made from laser-cut acrylic sheets.
Controller Board
Custom circuit board designed for the BlackPill MCU and the TB6612FNG motor driver, capable of driving four motors with PID control.
Effective Testing with ChassisTuner
Hardware Testing
Verify communication with the controller and monitor the robot’s status in real time.
PID Fine-Tuning
Adjust PID parameters for each motor with real-time visualisation on interactive charts.
Scalable Robotics System with LGDXRobot Cloud
Remote Monitoring
Monitor the status of LGDXRobot2 through a real-time web interface.
Automation Task Management
Assign LGDXRobot2 to execute automation tasks, such as transportation.
Unlimited Possibilities with ROS 2
RViz
Visualise the LGDXRobot2 model, motor movements, and sensor data.
Nav2
Perform mapping and autonomous navigation in real-world environments.
Webots
Run ROS 2 and LGDXRobot Cloud in simulation without requiring a physical LGDXRobot2.
Rapid Deployment of Remote ROS 2 Interface
docker run -d \ --name lgdxrobot2 \ -e PUID=1000 \ -e PGID=1000 \ -p 3000:3000 \ -p 3001:3001 \ yukaitung/lgdxrobot2-desktop:latest